02 43 69 62 98
02 43 69 62 98

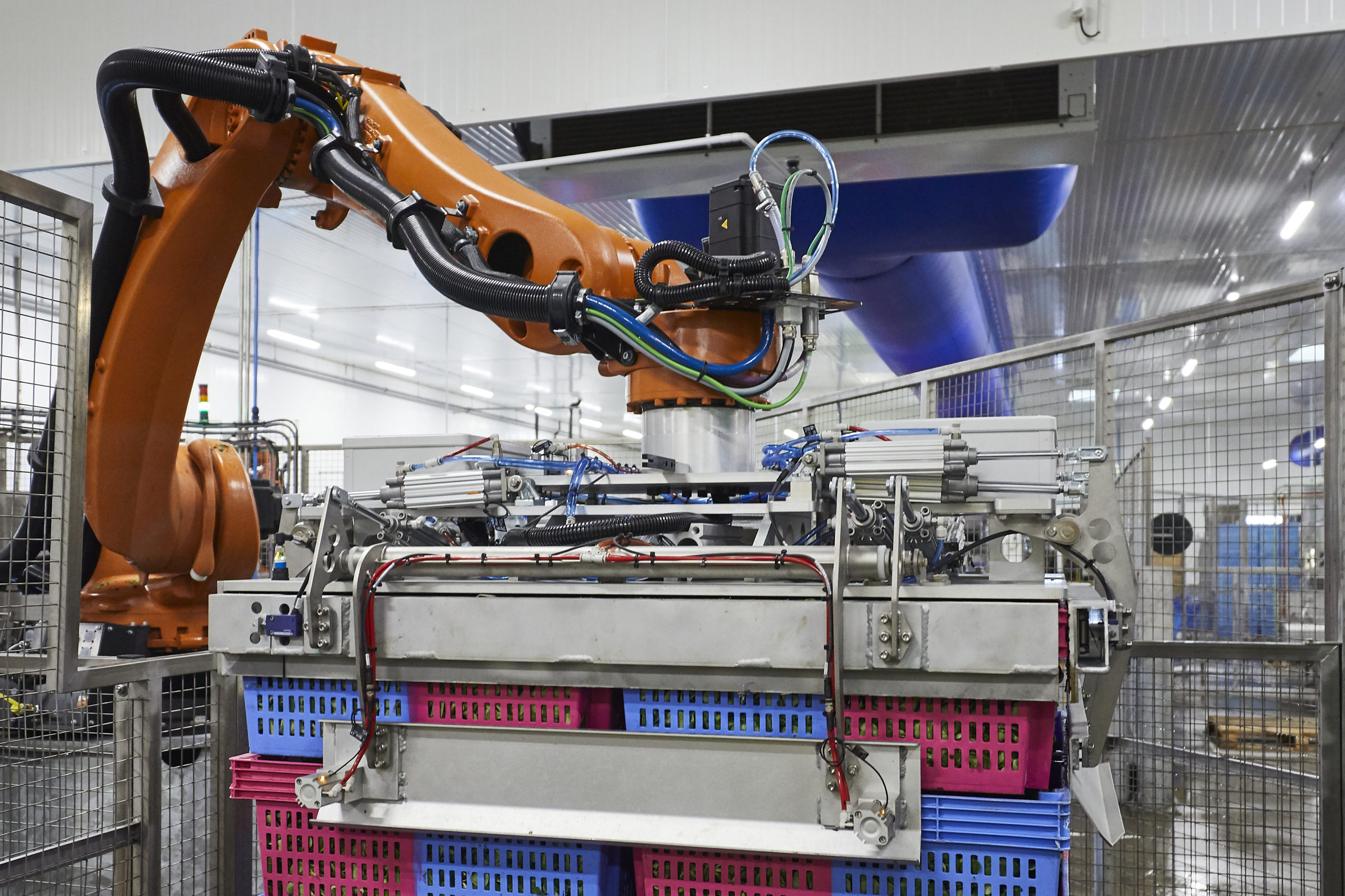
Conception d’un préhenseur sur mesure
Qu’est-ce qu’unrobot préhenseur ?
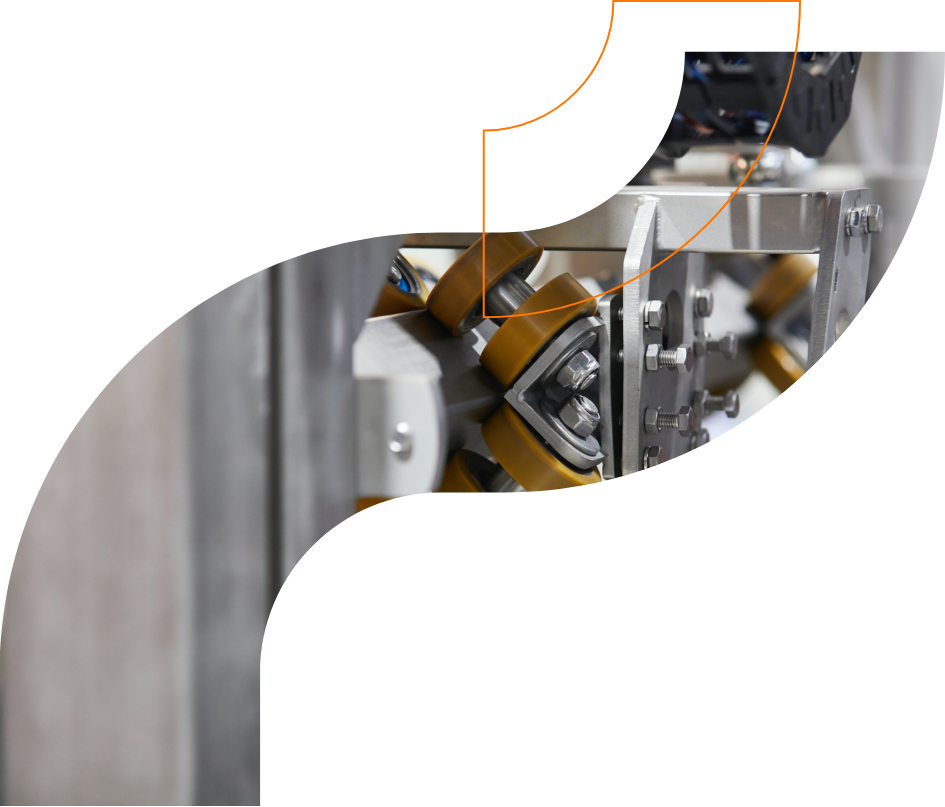
Il est difficile de faire fonctionner un robot industriel s’il n’est pas équipé de préhenseur. En effet, un dispositif de préhension est nécessaire pour déplacer et manipuler des objets.
En robotique, il est impératif de concevoir un bras préhenseur, que ce soit une pince ou des manipulateurs ventouses. Bien sûr la mise en place d’un préhenseur et son changement permet d’être flexible selon le produit à manipuler.
Sans solution de préhension, le robot ne peut fonctionner. C’est un des principaux éléments sur un robot, la pince au bout du robot permet de prendre une charge pour la centrer ou la déplacer.
Pour que le robot puisse réaliser les activités demandées, il y a plusieurs facteurs à prendre en compte le poids du produit à manipuler et le poids du système de préhension. Ils font tout deux parties du poids que doit soulever le robot. De ce fait, il faut également bien calculer la force de préhension. Si celle-ci est faible, le carton, la boîte ou la barquette risque de tomber et si celle-ci est trop forte, la pince risque d’écraser vos produits.
Il est difficile de faire fonctionner un robot industriel s’il n’est pas équipé de préhenseur. En effet, un dispositif de préhension est nécessaire pour déplacer et manipuler des objets.
En robotique, il est impératif de concevoir un bras préhenseur, que ce soit une pince ou des manipulateurs ventouses. Bien sûr la mise en place d’un préhenseur et son changement permet d’être flexible selon le produit à manipuler.
Sans solution de préhension, le robot ne peut fonctionner. C’est un des principaux éléments sur un robot, la pince au bout du robot permet de prendre une charge pour la centrer ou la déplacer.
Pour que le robot puisse réaliser les activités demandées, il y a plusieurs facteurs à prendre en compte le poids du produit à manipuler et le poids du système de préhension. Ils font tout deux parties du poids que doit soulever le robot. De ce fait, il faut également bien calculer la force de préhension. Si celle-ci est faible, le carton, la boîte ou la barquette risque de tomber et si celle-ci est trop forte, la pince risque d’écraser vos produits.
Chez Hubert Process, nous concevons dans nos ateliers les préhenseurs pour chaque projet. Après une étude de vos besoins, le bureau d’étude se charge de concevoir un modèle sur mesure pour répondre parfaitement à vos objectifs. Depuis plus de 30 ans, nous réalisons pour divers horizons de l’industrie : agroalimentaire, maraîchage, pharmaceutique et cosmétique des solutions de préhension sur mesure.
Chez Hubert Process, nous concevons dans nos ateliers les préhenseurs pour chaque projet. Après une étude de vos besoins, le bureau d’étude se charge de concevoir un modèle sur mesure pour répondre parfaitement à vos objectifs. Depuis plus de 30 ans, nous réalisons pour divers horizons de l’industrie : agroalimentaire, maraîchage, pharmaceutique et cosmétique des solutions de préhension sur mesure.

Les différentstypes de préhenseurs
Un préhenseur est utilisé pour manipuler différents types de charges.
Nous les concevons selon le poids du carton, boîte, barquette ou palox à manipuler. Notre objectif est de faciliter le robot, pour que la manipulation se réalise facilement et sans encombre. Différents dispositifs de préhension sont utilisés :
- Le préhenseur pneumatique réalise des mouvements linéaires ou rotatifs. Il possède uniquement deux positions, la position ouverte ou fermée. Grâce à de l’air comprimé, il s’ouvre et se referme parallèlement sur l’objet.
- Les préhenseurs électriques sont composés d’un ou de plusieurs moteurs électriques, il réalise également des mouvements linéaires ou rotatifs. En revanche, l’amplitude de la pince en position fermée et ouverte est facilement adaptable grâce à un programme.
- Le préhenseur ventouse ou préhenseur par aspiration est très utilisés pour la palettisation de produit, après emballage. Grâce à un vide d’air, ils peuvent aspirer des cartons, barquettes de produits frais, très courant en industrie agroalimentaire. Ils ont une faible consommation d’énergie, ce qui est important pour l’environnement.
- Il existe deux sortes de préhenseurs magnétiques : ceux à aimant et les préhenseurs électromagnétiques qui utilisent une source d’énergie électrique. Il est uniquement utilisable pour des contenants en métal.
Nous les concevons selon le poids du carton, boîte, barquette ou palox à manipuler. Notre objectif est de faciliter le robot, pour que la manipulation se réalise facilement et sans encombre. Différents dispositifs de préhension sont utilisés :
- Le préhenseur pneumatique réalise des mouvements linéaires ou rotatifs. Il possède uniquement deux positions, la position ouverte ou fermée. Grâce à de l’air comprimé, il s’ouvre et se referme parallèlement sur l’objet.
- Les préhenseurs électriques sont composés d’un ou de plusieurs moteurs électriques, il réalise également des mouvements linéaires ou rotatifs. En revanche, l’amplitude de la pince en position fermée et ouverte est facilement adaptable grâce à un programme.
- Le préhenseur ventouse ou préhenseur par aspiration est très utilisés pour la palettisation de produit, après emballage. Grâce à un vide d’air, ils peuvent aspirer des cartons, barquettes de produits frais, très courant en industrie agroalimentaire. Ils ont une faible consommation d’énergie, ce qui est important pour l’environnement.
- Il existe deux sortes de préhenseurs magnétiques : ceux à aimant et les préhenseurs électromagnétiques qui utilisent une source d’énergie électrique. Il est uniquement utilisable pour des contenants en métal.
Facteurs à considérer dans le choix d’un préhenseur pneumatique
Avant d’acheter ou de faire réaliser un préhenseur sur mesure, veuillez prendre ces différents facteurs en considération.
Il faut prendre en compte la forme de la pièce. En effet, un pneumatique à deux mâchoires est la solution idéale si votre produit à deux surfaces planes. Des produits cylindriques peuvent également convenir.
Comme nous l’avons vu plus haut, le poids de la pièce est très important. Une force de préhension doit être calculée pour ne pas endommager les produits. La conception de la mâchoire doit prendre en compte la force de préhension la plus adaptée pour vos besoins.
Tous les préhenseurs ne peuvent être utilisés dans n’importe quel environnement. Un environnement difficile comme les salles blanches, nécessitent une conception particulière.
Il faut attribuer un espace de travail pour que le robot réalise son travail sans blesser un opérateur autour de lui. Des zones de sécurité doivent être soigneusement choisis.
NOS solutions de robotique industrielle
Nous concevons également plusieurs types de robots industriels tels que des :
- Robots de vide palox, vidage caisse ou retourneur de palox
- Robots de palettisation
- Robots de dépalettisation
- Dépileur
- Empileur
- Robots SCARA
- Robots Delta
- Robots Kuka
- Robots 6 axes
- Robots de manutention
- Robots de conditionnement
- Robots d’encaissage
- Robots de vide palox, vidage caisse ou retourneur de palox
- Robots de palettisation
- Robots de dépalettisation
- Dépileur
- Empileur
- Robots SCARA
- Robots Delta
- Robots Kuka
- Robots 6 axes
- Robots de manutention
- Robots de conditionnement
- Robots d’encaissage

Grâce à notre expertise dans le domaine du maraîchage, nous connaissons parfaitement les tâches pénibles et dangereuses à réaliser. L’augmentation de votre productivité est importante, ainsi que la sécurité. C’est pourquoi nous concevons sur mesure tous types de robots industriels afin de supprimer ces tâches pénibles. Nous sommes capables de transporter des barquettes, des colis bois, des caisses plastiques, des cartons, des palox (en bois ou plastique), des aliments, des palettes, conteneurs fils métalliques, grilles métalliques…
Palettisation
palettiseur, robot de palettisation

Encaissage
robot d’encaissage, tripod

vide palox
retourneur de palox, vide palox

empilage
empilage, dépilage