02 43 69 62 98
02 43 69 62 98


Hubert Process conçoit et intègre de la robotique Industrielle depuis 1991 et notamment des robots polyarticulés de puis 2008, dans le but de :
Chez Hubert Process, nous intégrons notre client
à la conception de son futur ilot robotisé.
L’expérience et la connaissance du client de ses produits à manipuler ainsi que des contraintes d’environnement sont essentielles. Nous intégrons cette expérience à notre expertise technique afin de déterminer la solution idéale.
La robotiqueindustrielle
La robotique industrielle est présente dans plusieurs domaines de l’industrie. Ce système permet l’automatisation de tâches pénibles, dangereuses sur une ligne de production afin de gagner en productivité, flexibilité et en sécurité. L’automatisation est la solution idéale pour beaucoup d’entreprises. En effet, les robots industriels sont plus flexibles que des machines spéciales, car en cas de changement, il est possible d’adapter la chaîne de production.
Qu’est-ce qu’unrobot industriel ?
Les robots industriels sont multifonctions, polyvalents et programmables sur deux axes ou plus. Chaque robot possède des caractéristiques propres avec ses avantages et inconvénients. Lors du choix de vos robots, il est important de prendre en compte le rayon d’action et la charge de portée maximale. Ce sont ces deux critères qui limitent le champ d’action d’une machine, ils feront pencher la balance. Il est toujours possible d’améliorer la performance d’un robot en augmentant ses axes.
Chez Hubert Process, nous intégrons ces deux types de robot sur votre ligne d’automatisation sur-mesure pour s’adapter à vos besoins. Tout d’abord, nous allons étudier votre projet. Puis, nous concevons et fabriquons votre projet de robotique industrielle. Enfin, nous intégrons vos robots industriels sur votre chaîne de production et nous formons également vos opérateurs pour une utilisation optimale de vos robots. Notre prestation clé en main, vous permettra de gagner en productivité, flexibilité et surtout d’améliorer la qualité de vos produits.
Comment fonctionne un robot industriel ?
L’utilisation de robot est un outil essentiel dans de nombreuses industries comme celle de l’agroalimentaire, la pharmaceutique, l’automobile, la métallurgie et la cosmétique. La robotique industrielle s’adapte à différentes applications.
Pour comprendre le fonctionnement d’un robot industriel, il faut connaître les différentes composantes qui constituent le système robotisé. Il y en a trois :
- La partie mécanique est le bras articulé programmable sur deux axes ou plus, composé de moteurs à chaque axe. La présence d’une succession de joints donne au robot la liberté d’atteindre n’importe quelle orientation et position.
- La partie informatique permet une meilleure collaboration avec l’utilisateur et son environnement. En effet, grâce au langage de programmation, l’utilisateur commande le robot.
- La partie électronique est composée de l’unité centrale avec l’armoire de commande. Cette composante permet de récolter et de contrôler les données du robot grâce aux variateurs de vitesse et ses capteurs.
- La partie mécanique est le bras articulé programmable sur deux axes ou plus, composé de moteurs à chaque axe. La présence d’une succession de joints donne au robot la liberté d’atteindre n’importe quelle orientation et position.
- La partie informatique permet une meilleure collaboration avec l’utilisateur et son environnement. En effet, grâce au langage de programmation, l’utilisateur commande le robot.
- La partie électronique est composée de l’unité centrale avec l’armoire de commande. Cette composante permet de récolter et de contrôler les données du robot grâce aux variateurs de vitesse et ses capteurs.
Pour faire fonctionner le robot, il suffit de le programmer. Tous les éléments de la chaîne seront tous reliés et permettre d’automatiser des tâches spécifiques. Les mouvements d’un robot industriel sont programmés à travers trois méthodes :
- La programmation par apprentissage : cette méthode créée des positions de travail et des trajectoires grâce à la mémorisation de données cartésiennes. Le réglage s’effectue directement sur le boîtier de contrôle du robot, ou par guidage manuel avec les outils adaptés.
- La méthode calculée : grâce à un premier point, on détermine la position des autres points. Cette méthode est particulièrement utilisée en cas de tâches répétitives.
- Enfin, la programmation hors-ligne permet de créer, simuler et régler les trajectoires du robot avant sa mise en ligne.
- La programmation par apprentissage : cette méthode créée des positions de travail et des trajectoires grâce à la mémorisation de données cartésiennes. Le réglage s’effectue directement sur le boîtier de contrôle du robot, ou par guidage manuel avec les outils adaptés.
- La méthode calculée : grâce à un premier point, on détermine la position des autres points. Cette méthode est particulièrement utilisée en cas de tâches répétitives.
- Enfin, la programmation hors-ligne permet de créer, simuler et régler les trajectoires du robot avant sa mise en ligne.
Combien coûte un robot industriel ?
Le coût varie en fonction de la complexité de votre robot. Grâce à l’étude de votre projet, nous serons en mesure de vous fournir un devis détaillé répondant à vos besoins. Consultez-nous dès maintenant, nos équipes sont à votre écoute.
Quelles sont les principales marques de robots industriels ?
Ils existent plusieurs marques de robots industriels sur le marché de la robotique industrielle dont Kuka, Fanuc Robotics, Bosch ou encore Stäubli.
Depuis 2008, nous intégrons des robots de marque KUKA et FANUC Robotics, avec 4,5 ou 6 axes.
Pourquoi automatiser ses lignes de productions avec la robotique industrielle ?
La rapidité d’exécution est décuplée grâce à la robotique industrielle. L’homme n’est pas capable d’effectuer des tâches répétitives, de façon précise et sur une longue période comme les bras robotique. C’est pourquoi l’automatisation industrielle est une question importante dans les secteurs d’activités industriels, qui sont toujours à la recherche de gain de productivité et de qualité.
Pour en savoir plus, lisez notre article sur comment les lignes de production sont optimisées grâce aux robots industriels.
NOSROBOTS INDUSTRIELS
Nous développons des process robotisés afin de garantir une palettisation rapide et précise, un encaissage de tout types de barquettes ou sachets dans un contenant, la manipulation de contenants comme des conteneurs fils, des phlox, ou des caisses, l’empilage et le dépilage de colis bois, cartons, conteneurs grillagés ou encore de caisses plastiques.
Nous concevons et fabriquons l’outil sur mesure qui manipulera votre produit. Nous déterminons la solution robotisée la plus adaptée à vos contraintes d’environnement, de cadence et de rayon d’action.

Les préhenseurs sont étudiés par notre bureau d’étude et fabriqués dans nos ateliers. Chaque préhenseur est conçu spécifiquement pour vos produits. Nous prenons en compte les spécificités de votre type de produits comme sa taille, son format, son poids, sa fragilité. De plus, il peut être polyvalent en ayant la possibilité de prendre, par exemple, une palette vide (de différentes dimensions) ou des caisses.
Nous intégrons également tous les équipements mécaniques nécessaires au bon fonctionnement du robot, comme les tables de préparation à la palettisation (préparation de couches), le convoyage, les enceintes sécurisées;
Nous développons nos propres interfaces homme / machine intuitives, ergonomiques et vous formons dessus.
VOTRE ROBOT PALETTISEURSUR MESURE
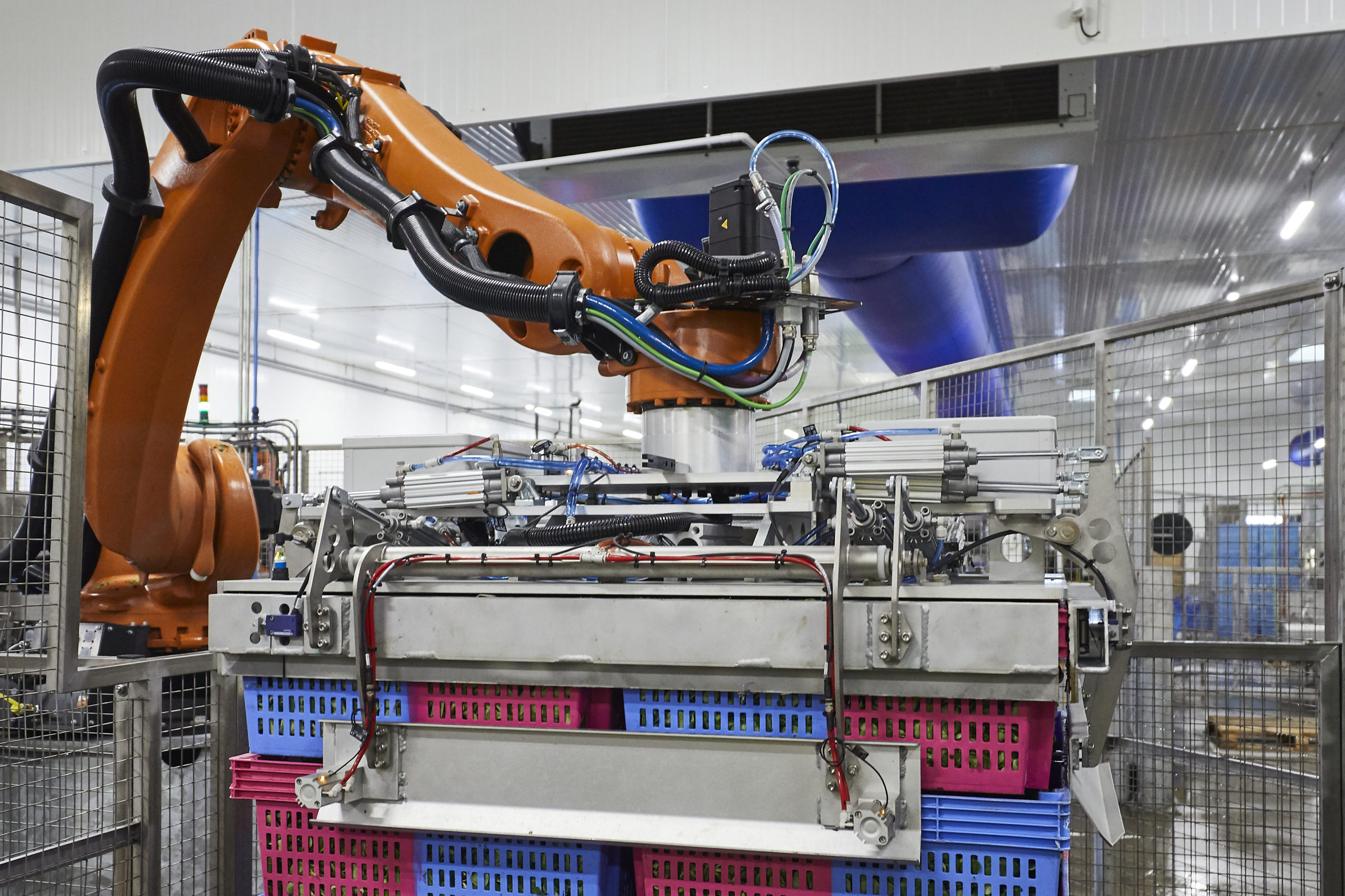
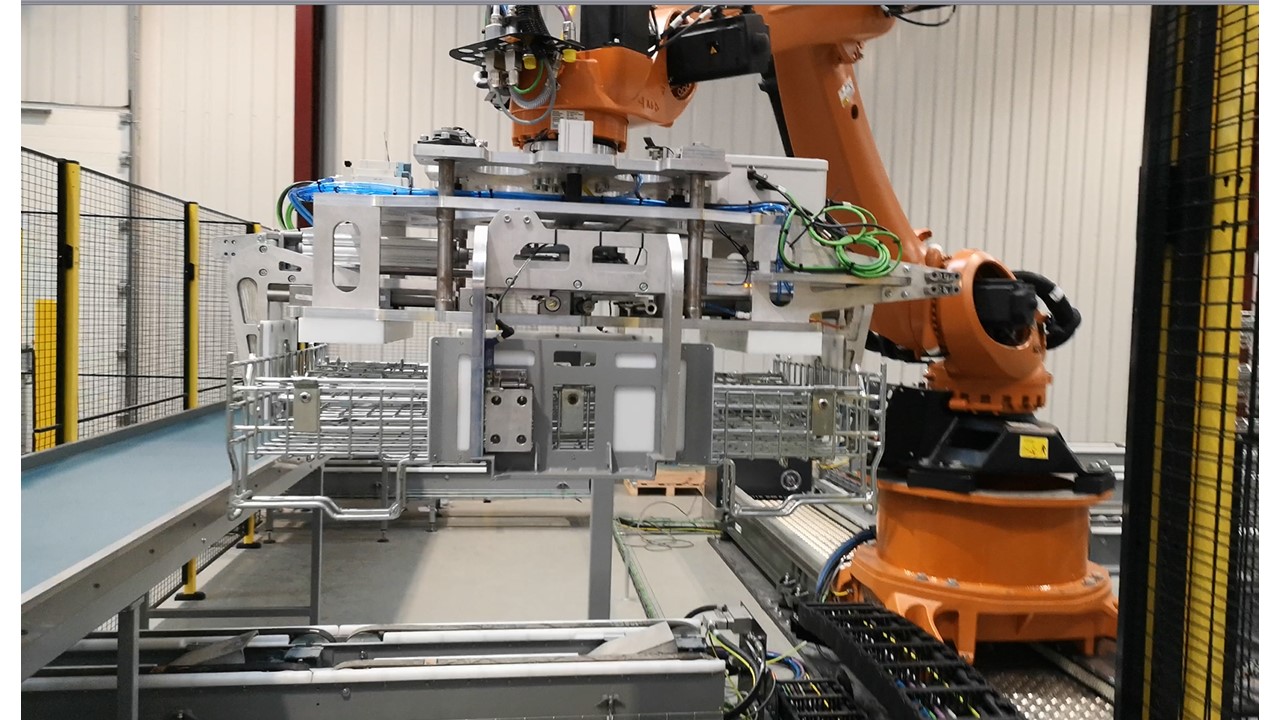
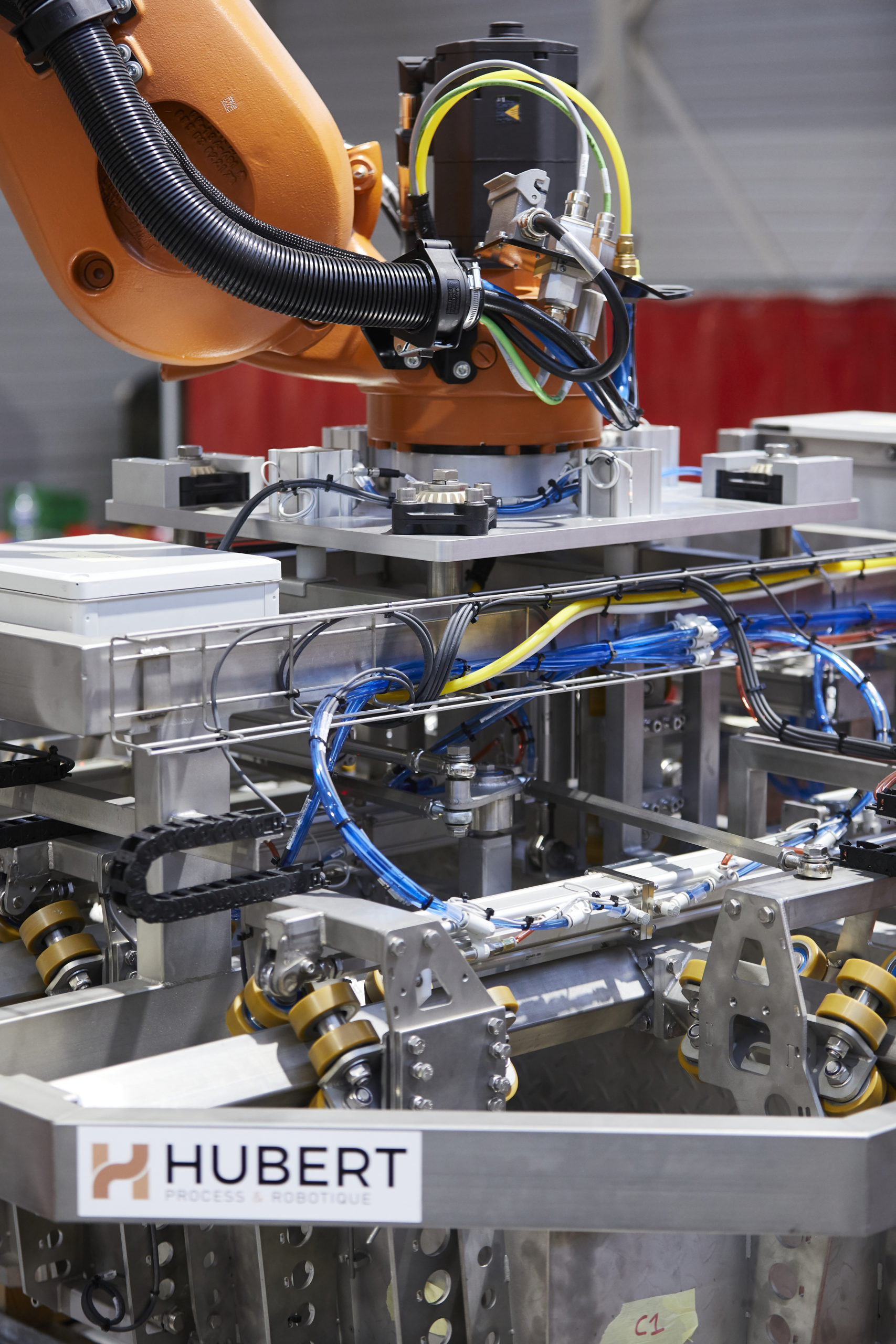
En solution de robotique industrielle, nous fabriquons des solution à la palettisation et la manipulation de palettes et caisses par le biais d’un robot de palettisation automatisé. Ce robot possède un préhenseur conçu sur-mesure pour le produit à déplacer, que ce soit une palette, des caisses, un palox ou autre.
les robots polyarticulés offrent une grande souplesse d’utilisation et d’adaptation en fonction du produit que vous souhaitez manipuler. Nous intégrons depuis 2008 des robots de marque KUKA et FANUC, des robots de 4, 5 ou 6 axes.
Exemple de robot industriel
VOS PREHENSEURSSUR MESURE
Nous concevons les préhenseurs afin de pouvoir venir avec le robot prendre le produit par exemple une palette puis la déplacer d’un point A au point B et la redéposer. De plus, il est possible de venir prendre des caisses remplies de barquettes de mâches et de les placer par couches sur la palette en les empilant.
Nos préhenseurs peuvent être polyvalents et effectuer par exemple la prise de caisses + la prise de palettes vides. Il peut être multi-produits et réaliser la préhension par couches ou par piles. Il peut également être mono-produit si votre cadence le permet.
Dans le cas du multi-produits, notre préhenseur peut palettiser par couches
de format 1 200 x 1 000 mm, 1 200 x 800 mm ou à vos formats spécifiques de palettes.
Nous réalisons également tous les équipements mécaniques environnants nécessaires au bon fonctionnement du robot comme les tables de préparation de couches de caisses avant la palettisation.
NOS ROBOTSDE PALETTISATION
Nous intégrons nos robots 4 axes, 5 axes et 6 axes comme des :
Nos formations régulières
Conduite et programmation de robots
Maintenance électrique et mécanique pour les entretiens périodiques
Conduite et programmation de robots
Maintenance électrique et mécanique pour les entretiens périodiques
Robot palettiseur
Palettisation, préhenseur, caisses plastiques

palettisation cartons
Palettisation, préhenseur, dépalettisation, cartons
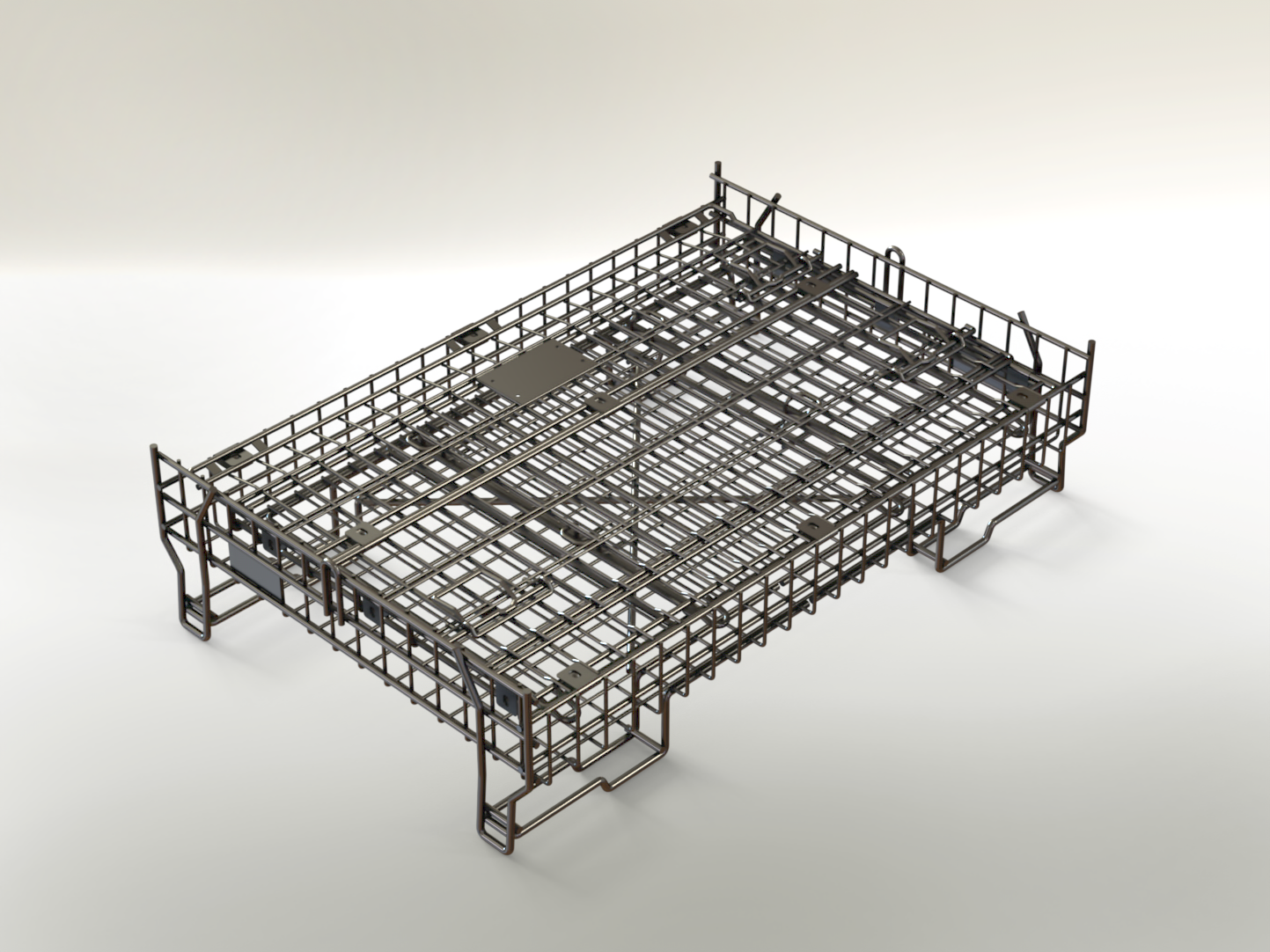
palettisation conteneurs fils
Palettisation, préhenseur, conteneurs fils, industrie

palettisation caisses plastiques
Palettisation, préhenseur, palettes, caisses plastiques
préhenseur sur mesure
Préhenseur, palettisation, robotique industrielle

Process de palettisation
Palettisation, automatisme, robotique, table de préparation de couches

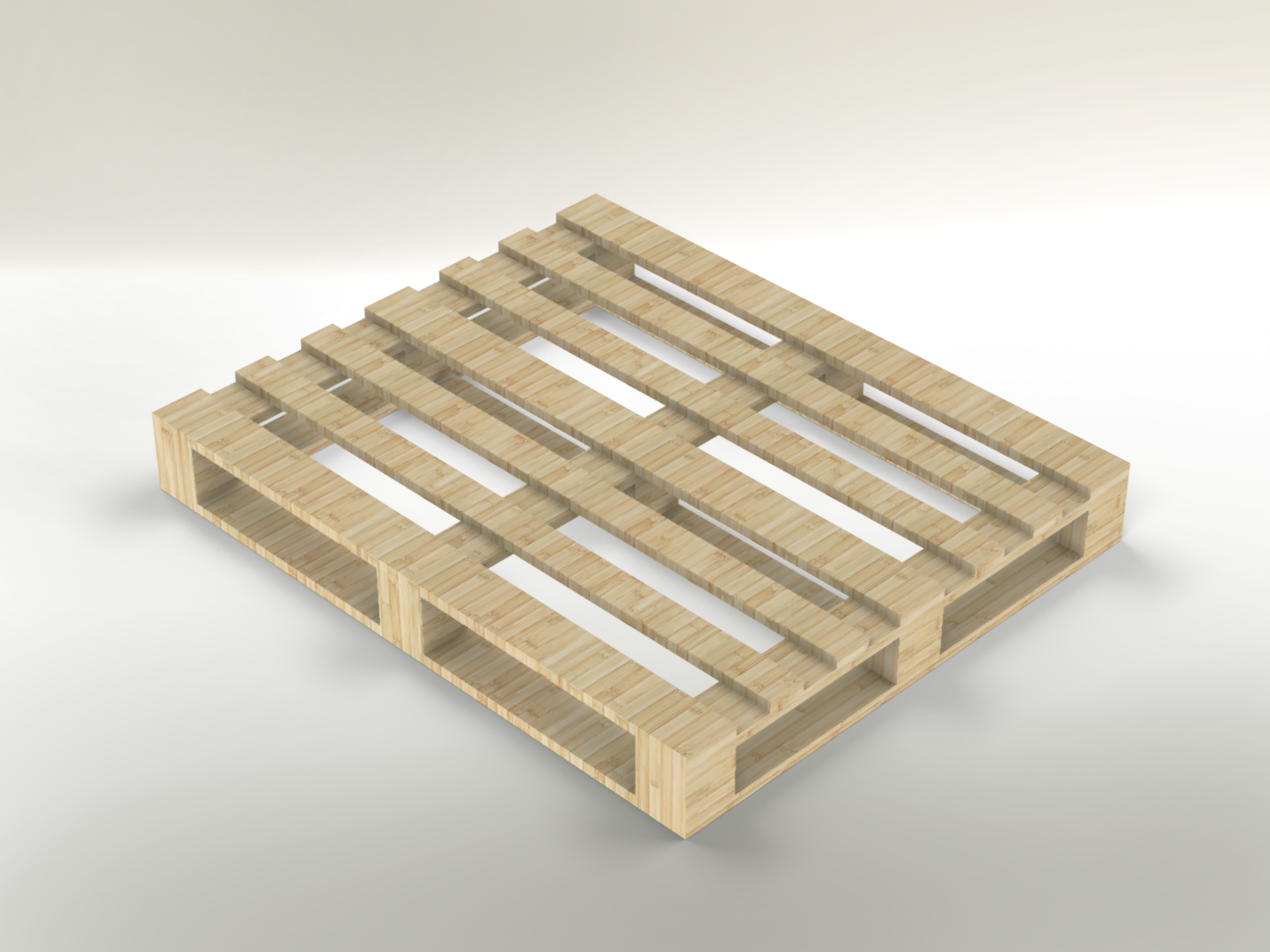
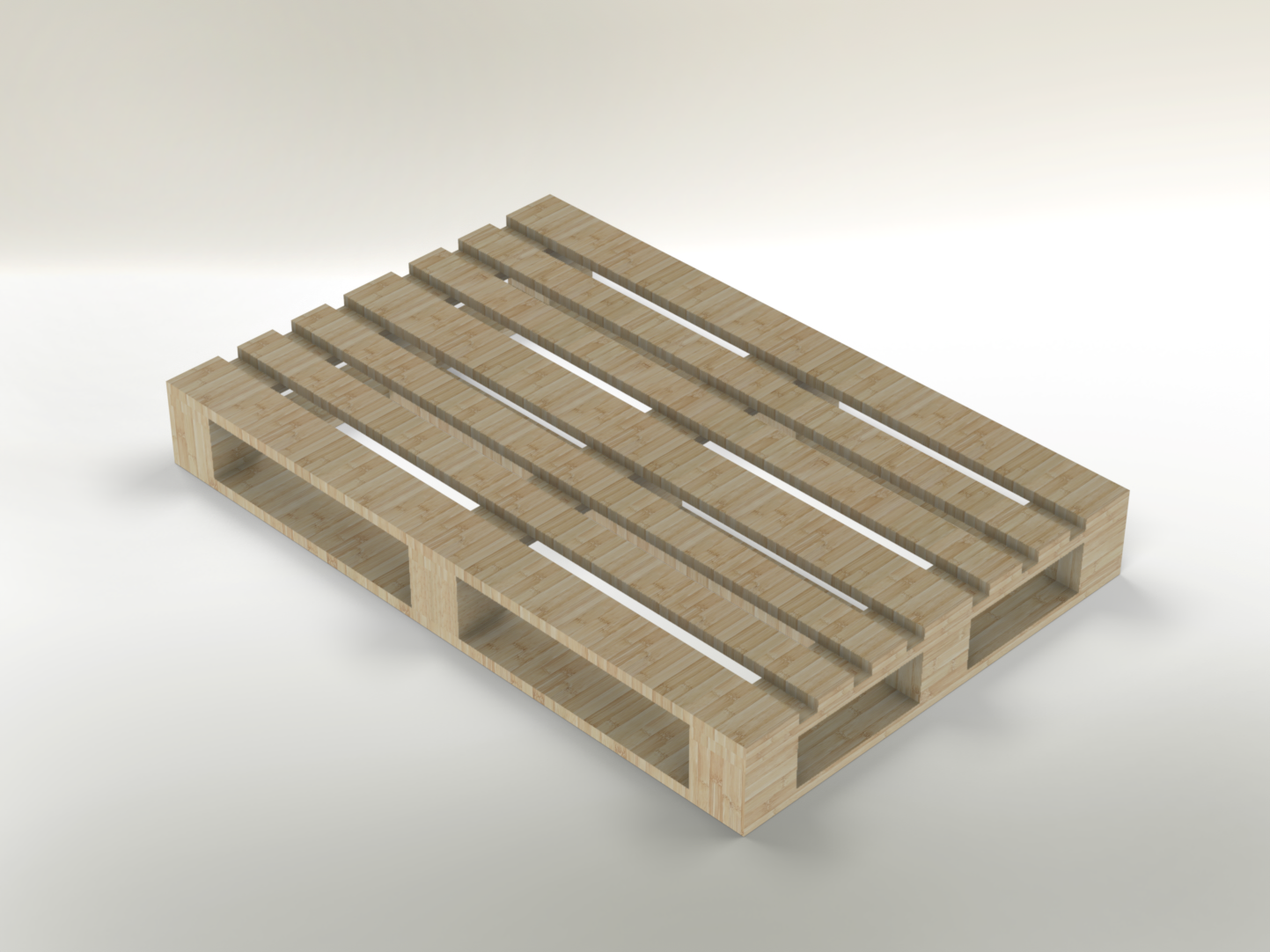
Palettisation colis bois
Robotique industrielle, préhenseur, colis bois, carotte
Nous manipulonsvos contenants



Colis bois
Cagettes, cageots
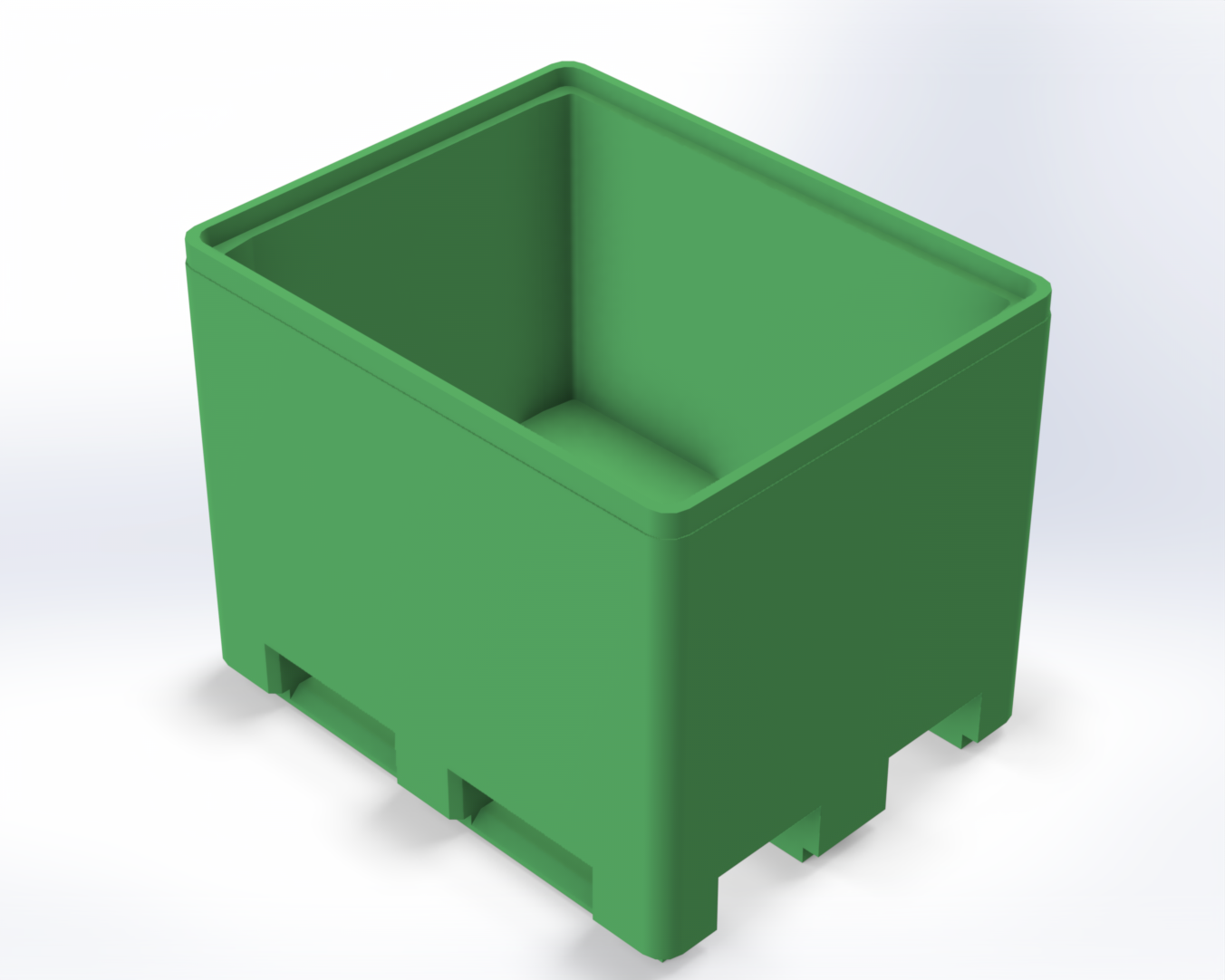
Palox 800×1000
Palox plastique ou bois
NOS ROBOTSD’ENCAISSAGE
Hubert Process conçoit et intègre des solutions pour encaisser tous types de barquettes (operculées, flow packs, thermoformés). Nos encaisseurs sont implantés en aval de machines de packaging. Nous encaissons ces différents produits dans des cartons, caisses plastiques ou autres contenants.
Nous adaptons le préhenseur suivant le type de barquette et la cadence.

Nous déterminons la solution robotisée adapté à votre besoin en cadence et en enveloppe de travail :
Robot cartésien avec 2 servomoteurs développé en interne (système Roller Gantry)
Robot Delta ou robot Araignée
Robot 6 axes
LES INNOVATIONS
TECHNOLOGIQUES D’ENCAISSAGE
Nous utilisons toutes les dernières technologies nécessaires :
Préhension par vide d’air avec ventouses ou mécanisée
Vision 3D pour reconnaissance de forme et d’orientation
Caméra de détection de présence d’étiquettes ou de symbole
Sonde de température de barquettes détectant une éventuelle surchauffe au moment du thermocellage
Pesage dynamique à la volée contrôlant le poids des produits
En amont de l’encaissage, nous avons développé différentes solutions d’alimentation de cartons ou caisses comme des trieurs hautes cadences permettant de lire un code barre ou un tag RFID. Nous intégrons également dans nos process des machines de marquage jet d’encre continu sur toute surface.
Nous intégrons des empileurs de cartons ou autre, à la sortie de ces encaissages et également des robots de palettisation.

Robot d’encaissage de barquettes
Enssage barquette de mâche, robotique, automatisme

Robot d’encaissage
robotique industrielle



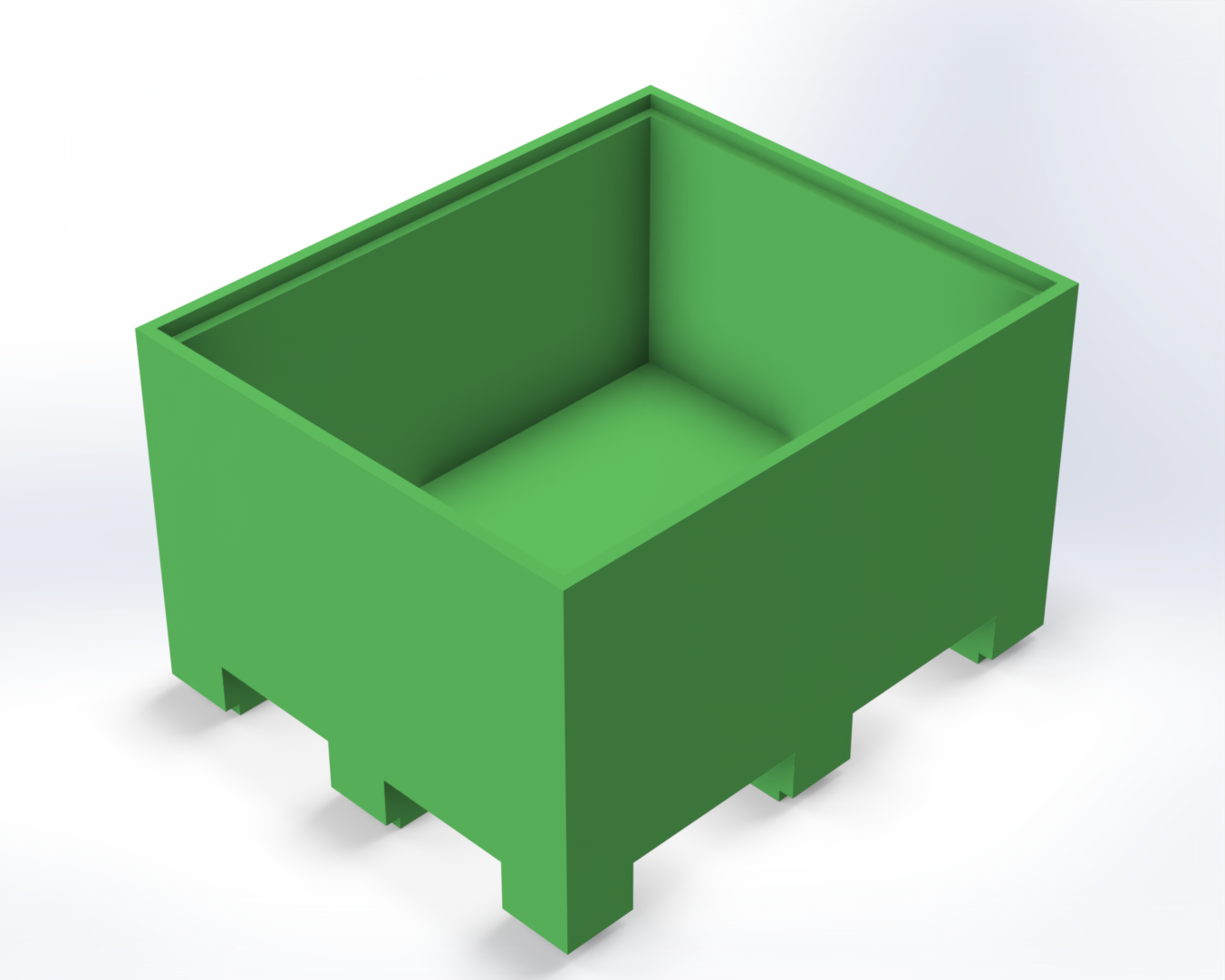
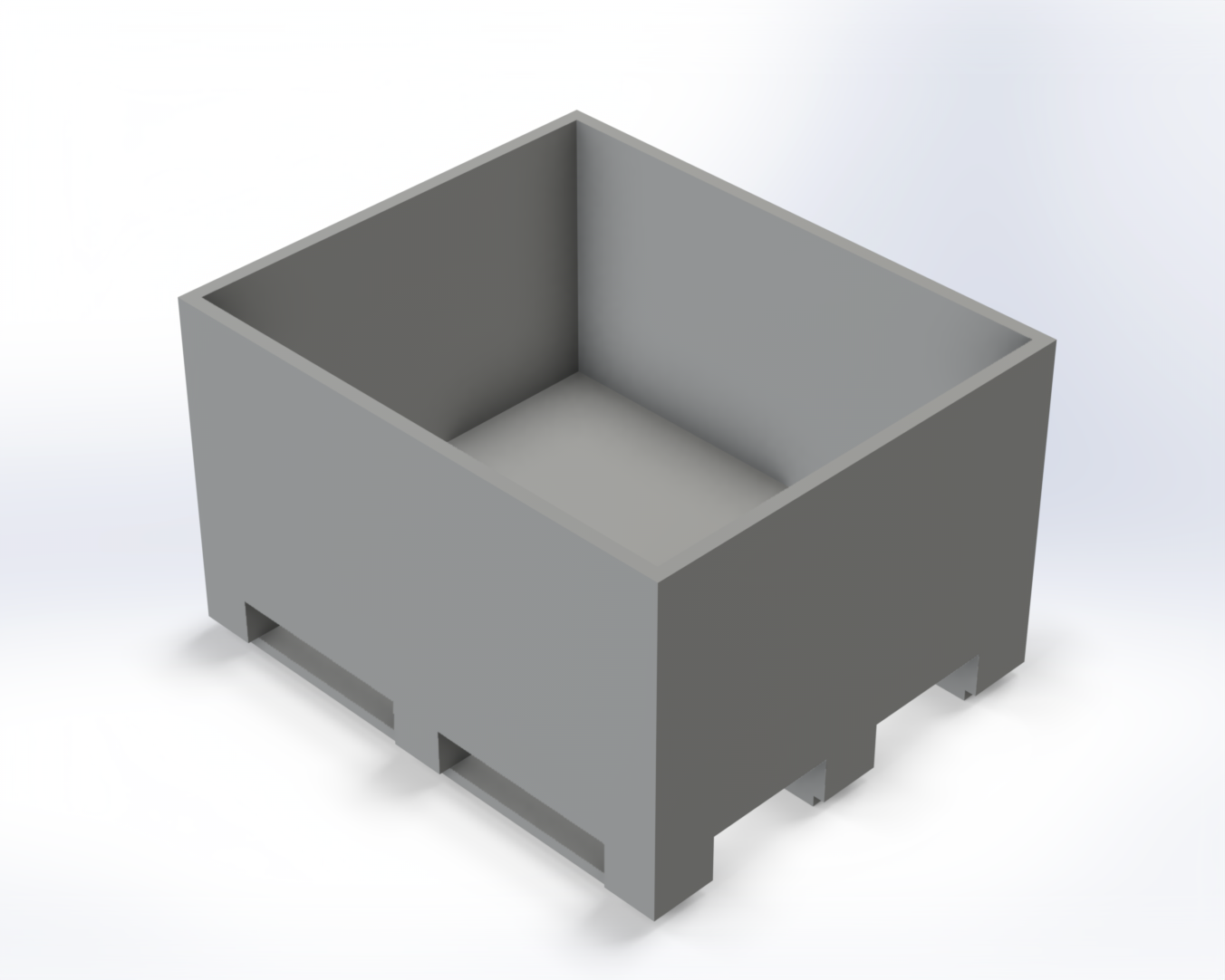
VIDEPALOX
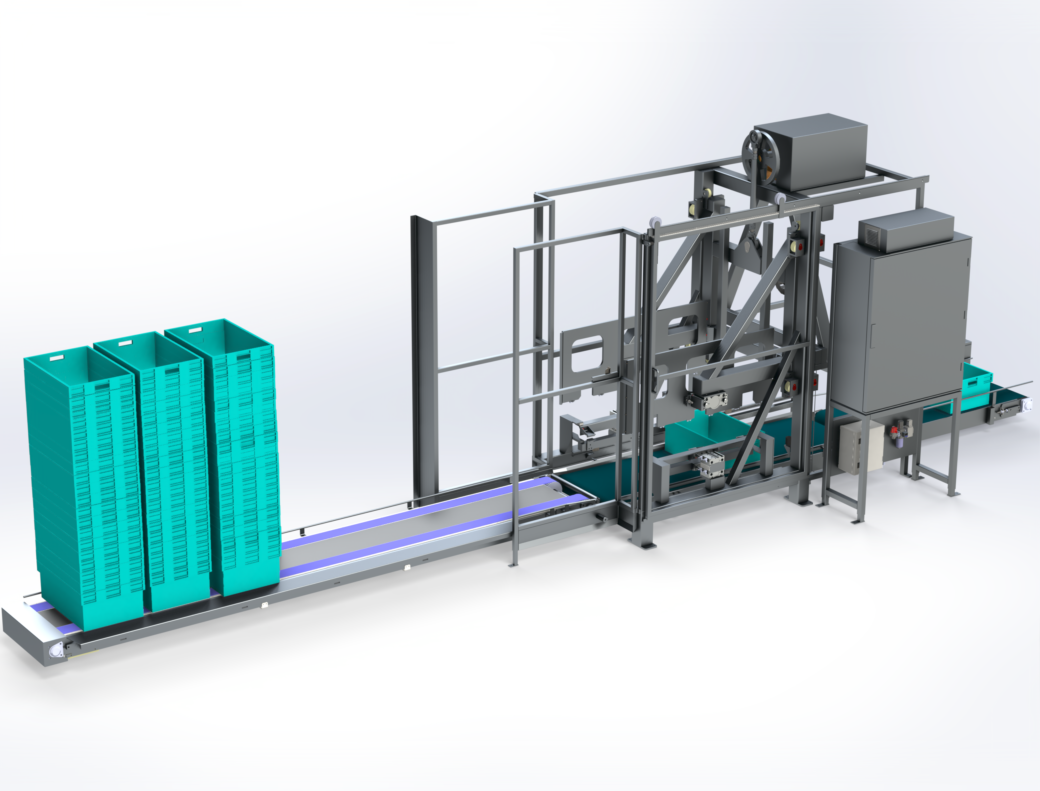
Le robot manipulateur de palox (caisses palettes ou bacs Europe) permet de gérer de façon autonome des opérations de dépilage, vidage, de retournement, d’empilage et de rinçage.
Durant la première phase le robot automatique « vide palox » va gérer le flux d’arrivée des palox pleins provenant des champs. Puis venir en prendre un sur le convoyeur palox. Ensuite il va se positionner, avec le palox plein, au-dessus de l’endroit où il doit vider le contenu.
On entre alors dans la deuxième étape où a lieu le vidage du palox dans le bac grâce à une rotation des pinces.
Le vidage fait, nous passons au rinçage avec des jets d’eau qui lave grossièrement le palox pendant quelques secondes afin d’enlever le sable restant. Le robot industriel va ensuite aller poser le palox vide sur un convoyeur de palox vide. Afin d’aller en chercher un autre plein. En savoir plus sur les vide palox.

Vide palox
Vide palox automatique, convoyeur palox, robotique industrielle

Vide palox
Manipulation de palox, toutes dimensions

Double vide palox
Robots cartésiens, convoyeur palox
DÉPILEUREMPILEUR
Manipulation et dépilage/ empilage
Fini les opérations pénibles et dangereuses de manutention de caisses plastiques, palox plastique ou bois, cartons, cageots bois ou palettes. Qu’ils soient vide ou pleins, Hubert Process automatise l’intégralité de ces tâches par le biais de :
Dépileur de caisses
Dépileur de palox (caisse palette)
Retourneur de caisses
Retourneur de palox
Empileur de caisses
Empileur de palox

L’expérience du dépilage et empilage
Nous arrivons aujourd’hui à dépiler et empiler sur une seule ligne jusqu’à 1800 caisses/heure ou 100 palox/heure. Nos machines sont capables de traiter plusieurs piles en même temps afin de répondre à vos cadences.
Nous intégrons notamment ces machines en amont et en aval de laveuses industrielles telles que des laveuses de palox ou des laveuses de caisses.
Nous travaillons en étroite collaboration avec un fabriquant de laveuses industrielles depuis 1997.
Vous déposez vos piles de contenants vides sales sur 1 de nos convoyeurs puis récupérez en fin de ligne les piles de ces contenants vides propres, une palettisation automatique est également possible. Ces solutions permettent de supprimer les taches pénibles et de gagner en productivité.